www.adoxx.org
www.adoxx.org  Design Thinking for Smart Supermarkets – Scene2Model
Design Thinking for Smart Supermarkets – Scene2Model
Modeling Method: Scene2Model
Devices: Raspberry Pi, USB Camera
Short Scenario Description:
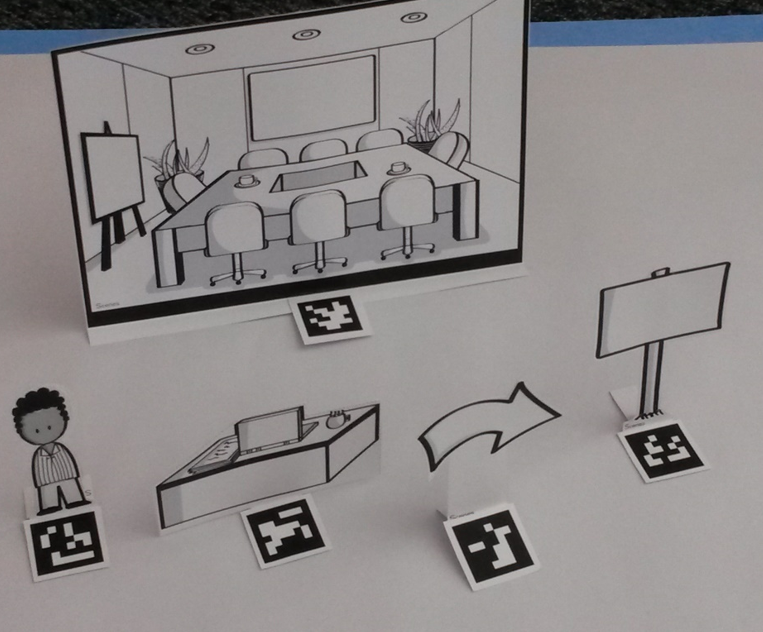
Because of the digital transformation, various different online shops and hybrid models, like "Click and Collect", "Drive-In" or "Pick-Up boxes" came up. Supermarkets offer products, which require special storage like cooling. Therefore, one possibility for them is to offer a service that allows customers to order online and pick-up their prepared shopping box in a pre-defined timeslot. Three major issues must be considered here: the ordering process, the filling of the shopping cart and the delivery to the customer. The scenario shows the digitization and transformation of scenes created with paper figures into models. This design thinking process is performed by various stakeholders during creative workshops. Different viewpoints and backgrounds lead to heterogeneous workshops. The discussed alternatives are supported by paper figures. The scenes can be imported into the modeling toolkit and evolved/detailed by adding textual explanations and references. After various feedback rounds and improvements, the models can serve as a starting point for changing processes. The scene on the picture shows the ordering. The customer is in his office and wants to order ingredients for dinner. The device used for ordering is a PC with corresponding infrastructure. The arrow indicates that the final order has forwarded to the supermarket. The sign shows that the order has been placed.
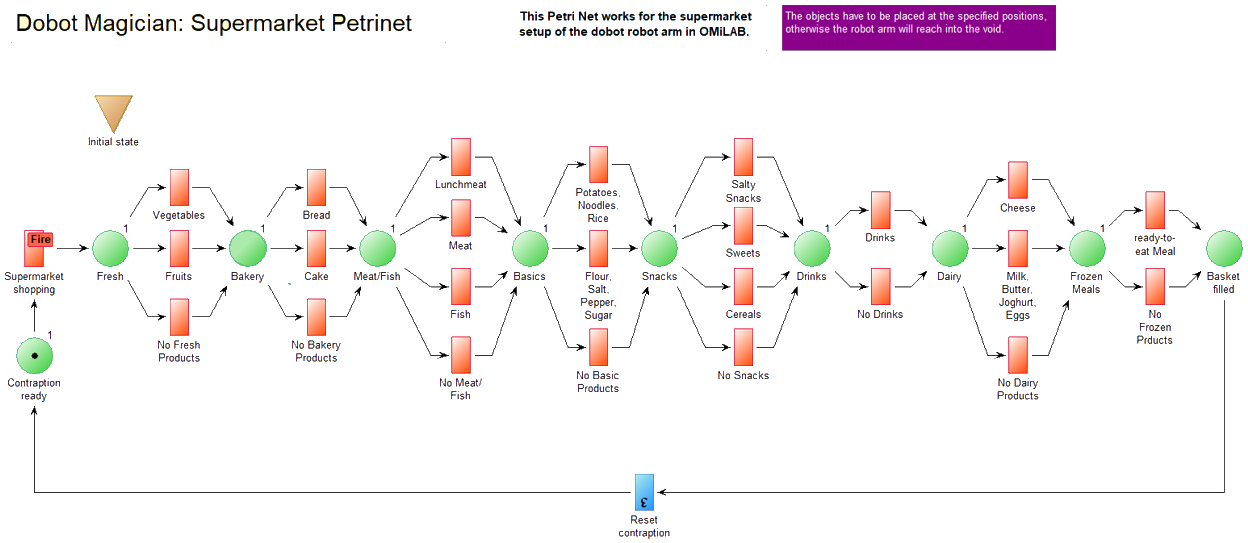
Hybrid Supermarket – Dobot Magician
Modeling Method: Bee-Up
Devices: Raspberry Pi, Dobot Magician with Suction Cup, USB Camera
Short Scenario Description:
In order to pick up the ordered products and place them in a shopping cart, models can be used to configure the robot arm. Common challenges here are to store the correct amount of goods in an efficient way for delivery. The training sample discusses the optimization, the modeling and the simulation of such assembly tasks. A major challenge is if the assembly arm, the single goods and/or the shopping basket is local or mobile. Various combinations are possible, some might be better for a specific scenario. Process diagrams might be useful to model and simulate the mentioned settings. To show the physical simulation with the Dobot Magician robot arm, two diagram types can be used for the execution: the flow chart and the petri net. For the flow chart, pre-defined elements allow to pick up, to move or to drop the goods. Various paths allow choosing between pre-configured packages. On the other side, the petri net allows changing the model during the execution. HTTP requests (https://www.adoxx.org/live/extended-http-requests-details) are used for the communication between model and robot. In our specific case, the supermarket offers 16 products that are stored in boxes with fixed positions around the robot. The shopping basket is moved to the robot arm and filled up there. The basic movements like pick up or drop an element, of the robot are transformed in simple flow chars. The patterns can be invoked in combined flow charts to collect a full order. Pre-defined packages can be ordered by using a flow chart having various paths. A petri net allows executing the collection of the products stepwise.

Mobility on Demand – mBot
Modeling Method: Bee-Up
Devices: Extended mBot (sensors, Raspberry Pi, Pi Camera, Power Pack)
Short Scenario Description:
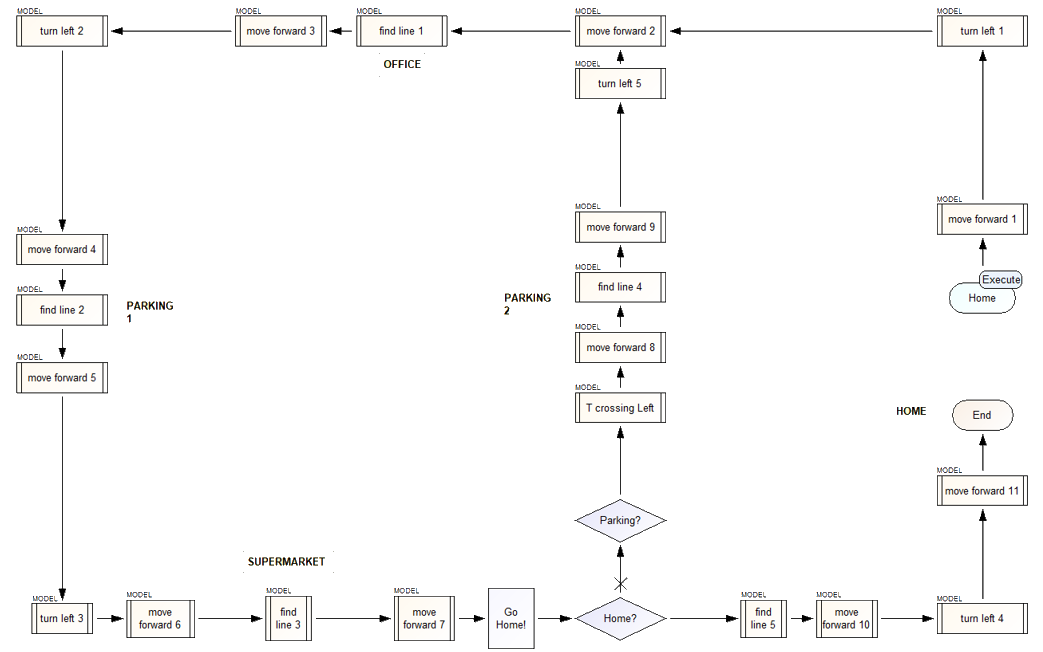
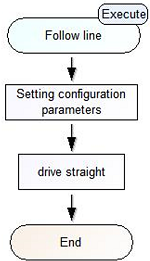
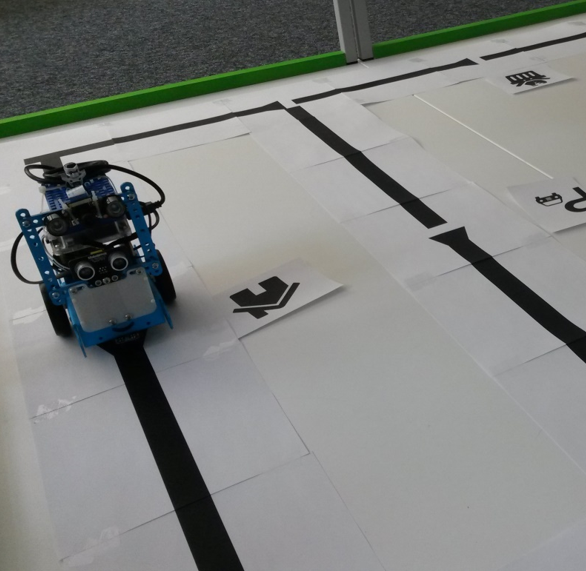
Smart mobility solutions are getting more important in today's society. Smart cities follow various strategies ranging from mobility-as-a-service platforms to autonomous vehicles. A lot of challenges like traffic management, environmental goals or public transportation must be considered. However, convenience does play a huge role, so extending plain mobility by the integration of additional services might be essential. The training sample shows how a typical day could be realized. The assumption is that there is a car and some food from the supermarket is required. The coordination of various mobility sub-services like parking the vehicle might be challenging. For the training sample, a self-driving car drops the customer at the office, parks and charges during the day, picks up the order at the supermarket and then collects the customer at the office before driving home. A flow chart consisting of various basic function models can be used to model the street map. Notice that the map-oriented way is not usual for representing a flow chart; however, it eases the first understanding. For sure, also the well-known flow chart representation can be used. Individual operations in the models are described by AdoScript code. Various routes are offered: Home-Office-Parking1-Parking2-Office-Home, Home-Office-Parking2-Office-Supermarket-Home, Home-Office-Supermarket-Home. The line follower sensor of the mBot is used to drive along the street that is provided as a black line. Interruptions of the line or specific corner elements are used for stops, turns and crossings.